




















解決方案 | 測繪無人機飛行場景可視化及針對任務分析的仿真實現
無人機最早出現在上個世紀的20年代,起初用于軍事作戰方面,發展至今,無人機的制造技術已全面提升,并且應用領域也更加廣泛。
根據無人機用途的差異,其構造也大相徑庭,不同的構造決定了無人機的特性和使用方向,包括:軍用的偵查無人機、誘餌無人機、電子對抗無人機、通信中繼無人機、無人戰斗機等,民用的包括:巡查無人機、農業無人機、氣象無人機、勘探無人機和測繪無人機等。其中測繪無人機用于地理信息采集,數據成像,本方案的主要內容就是測繪無人機的飛行及其任務的仿真。
測繪無人機的仿真內容包括:無人機路徑規劃、無人機飛行的狀態動畫和測繪任務的模擬顯示。通過一套完整的流程,展示無人機從起飛到任務執行,再到任務結束的全過程。
方案設計
本方案包括:無人機運動算法模塊、航線繪制模塊、測繪相機模擬顯示模塊、數據庫、三維顯示模塊和仿真驅動模塊。
數據庫用于存儲飛行數據、圖片數據和任務相關數據。三維顯示模塊用于三維渲染引擎構造三維仿真場景,從而以直觀的形式展示無人機的飛行和任務執行情況。
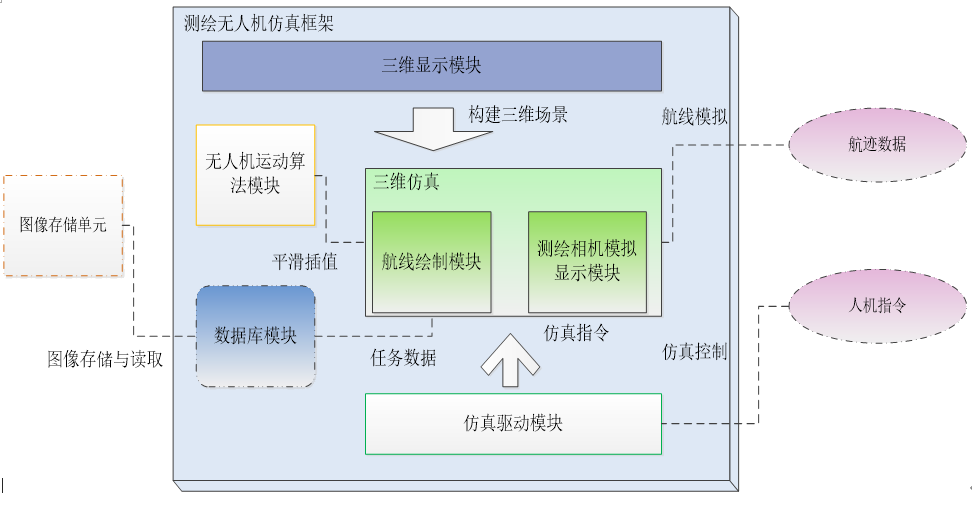
*測繪無人機仿真框架
地理環境
地理數據類型多種多樣,并且支持本地加載和網絡服務加載兩種方式。地理數據包括:地形高程、地貌影像、行政劃分區域等,同時可以加載局部區域的高清傾斜攝影數據,更加直觀的展示任務目標的周邊情況。

*無人機采集數據
航線規劃
航線規劃主要用于計算航線的關鍵點,再將關鍵點作為參數傳給三維節點,實時計算每一時刻無人機的位置和姿態。下圖為航線繪制的效果,在確定飛行的關鍵點后,按照時刻順序,將所有關鍵點依次連接,最后通過三維渲染的方式展示航線。
*航線繪制的效果
無人機運動算法模塊,用于計算無人機的數據驅動。傳入數據驅動無人機的方式有兩種,一種是通過外部已有數據傳入,數據需要確定無人機的位置、時刻、姿態信息;另一種是通過三維地圖選擇關鍵點的方式,從三維地圖上選擇關鍵點集,并在交互界面對數據進行時間、速度等屬性設置,對選擇關鍵點的位置信息進行調整和修改。
航線繪制模塊用于輔助顯示無人機的飛行路線,同時管理控制航線的關鍵點、顏色、類型等屬性,下圖為航線生成關鍵點示意圖,左側為航線規劃效果,右側屬性欄用于表示航線關鍵屬性。

*航線生成關鍵點示意圖
飛行動畫
在獲取到關鍵點信息后,還需要結合數據平滑插值算法,實時計算出無人機飛行過程中的每個時刻所處的位置和姿態。
飛機實時位置計算采用動態數據插值的策略,根據精確到每一幀的仿真時刻和對應仿真時刻前后整點的關鍵點位置計算求出當前幀的無人機位置、當前時刻的姿態,同樣采用上述關鍵元素,根據當前位置前后兩關鍵點,通過矢量計算,得出無人機飛行的俯仰角和偏航角,進而確定無人機的飛行姿態。

*計算飛機實時位置
測繪任務
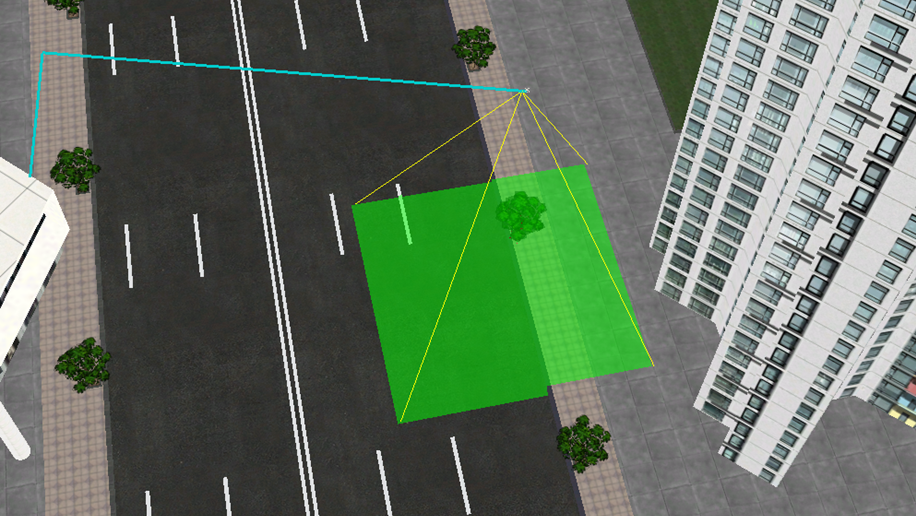
測繪相機模擬顯示模塊用于展示無人機在執行拍攝任務時,相機的拍攝空間、拍攝目標區域等信息。此階段是無人機的機載設備對地面信息的獲取,錐形區域為相機所能拍攝到的空間,地表的綠色區域為相機的搜索區域。
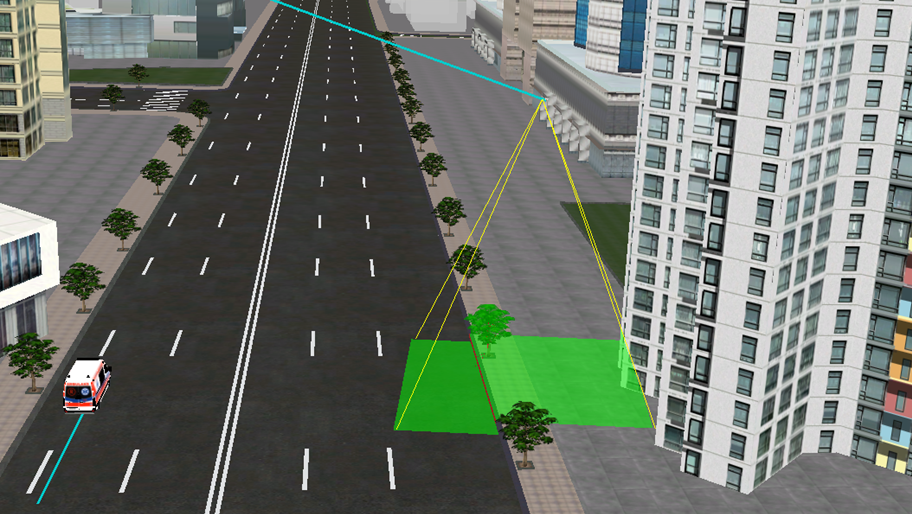
*無人機的機載設備獲取地面信息
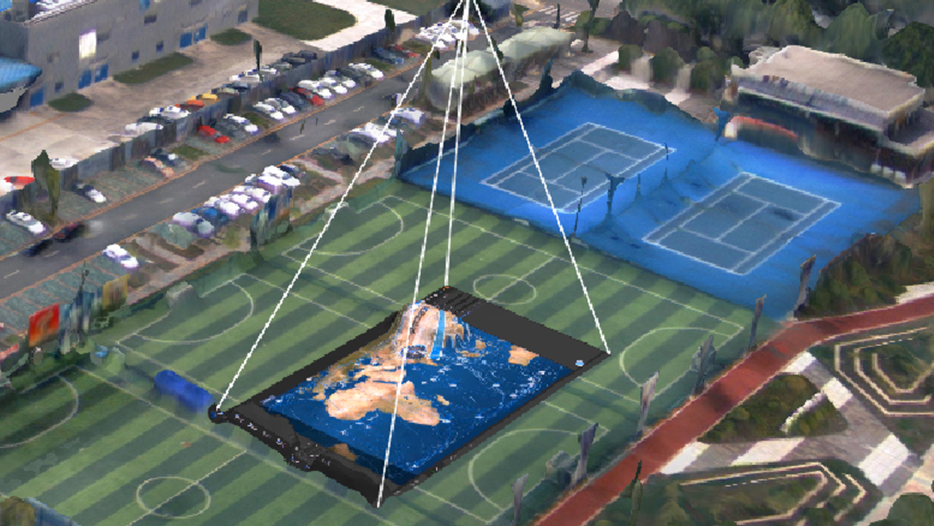
此階段為影像投射驗證(圖中數據為測試數據),將上一步無人機收集到的地理數據信息,投影到對應區域,從而驗證圖片信息是否與真實位置吻合。將影像投影到地面采用了RTT(Render To Texture,渲染到紋理)技術,實時獲取更新影像,并將其投射到地表。
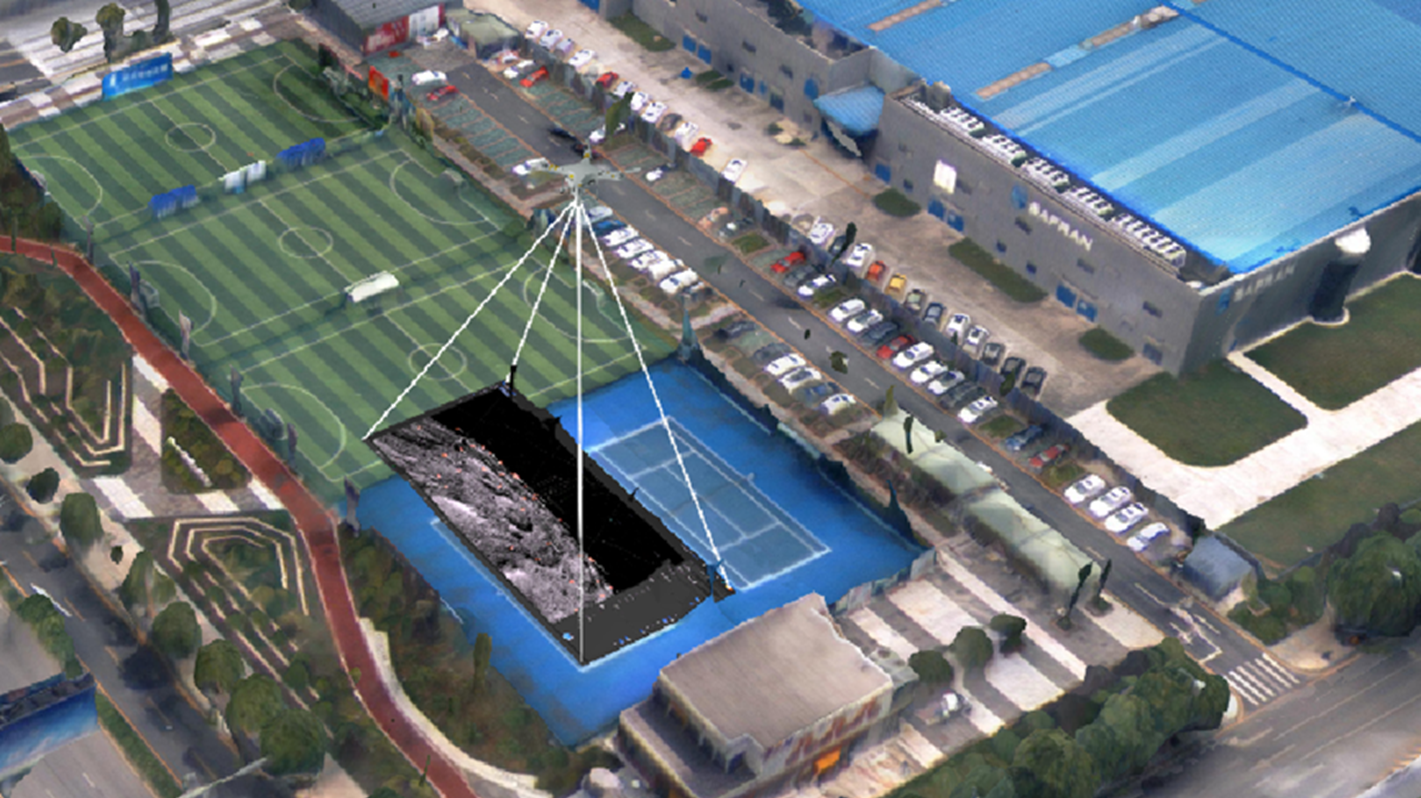
*影像投射驗證
在投射影像的過程中還考慮到了高程起伏,在高度有落差的情況下,也可以將影像圖片與帶有高程的地形完美結合。
*影像圖片與帶有高程的地形結合